Kegel (Geometrie)

Gerader Kreiskegel (links) und schiefer Kreiskegel
Ein Kegel oder Konus ist ein geometrischer Körper, der entsteht, wenn man alle Punkte eines in einer Ebene liegenden, begrenzten und zusammenhängenden Flächenstücks geradlinig mit einem Punkt (Spitze bzw. Apex) außerhalb der Ebene verbindet. Ist das Flächenstück eine Kreisscheibe, wird der Körper Kreiskegel genannt. Das Flächenstück nennt man Grundfläche, deren Begrenzungslinie die Leitkurve und den Punkt die Spitze oder den Scheitel des Kegels. Ein Kegel hat also eine Spitze (den Scheitelpunkt), eine Kante (die Leitkurve) und zwei Flächen (die Mantel- und die Grundfläche).
Unter der Höhe des Kegels versteht man einerseits das Lot von der Spitze auf die Grundfläche (die Höhe steht also immer senkrecht zur Grundfläche), andererseits aber auch die Länge dieses Lotes (also den Abstand der Spitze von der Grundfläche).
Die Verbindungsstrecken der Spitze mit der Leitkurve heißen Mantellinien, ihre Vereinigung bildet den Kegelmantel oder die Mantelfläche.
Inhaltsverzeichnis
1 Gerader und schiefer Kegel
2 Größen und Formeln
3 Beweise
3.1 Volumen
3.2 Mantelfläche
3.3 Mittelpunktswinkel α
4 Doppelkegel
5 Analytische Beschreibung
6 Kegelkoordinaten (Koordinaten-Transformation)
6.1 Parameterdarstellung
6.1.1 Umrechnung eines gegebenen Kegelsegments in Kegelkoordinaten
6.2 Flächennormalenvektor
6.3 Einheitsvektoren der Kegelkoordinaten in kartesischen Komponenten
6.4 Transformationsmatrizen
6.4.1 Jacobi-Matrix (Funktionalmatrix)
6.4.2 Transformationsmatrix S
6.5 Transformation der partiellen Ableitungen
6.6 Transformation der Einheitsvektoren
6.7 Transformation von Vektorfeldern
6.8 Oberflächen- und Volumendifferential
6.9 Transformierte Vektor-Differentialoperatoren
6.9.1 Nabla-Operator
6.9.2 Gradient
6.9.3 Divergenz
6.9.4 Laplace-Operator
6.9.5 Rotation
7 Verallgemeinerungen
8 Siehe auch
9 Literatur
10 Weblinks
11 Einzelnachweise
Gerader und schiefer Kegel |
Wenn in der Geometrie von einem Kegel gesprochen wird, ist häufig der Spezialfall des geraden Kreiskegels gemeint. Unter einem Kreiskegel versteht man einen Körper, der durch einen Kreis (Grundkreis oder Basiskreis) und einen Punkt außerhalb der Ebene des Kreises (Spitze des Kegels) festgelegt ist.

Die Ebene, in welcher der Basiskreis liegt, heißt Basis(kreis)ebene. Unter dem Radius r{displaystyle r} des Kegels versteht man normalerweise den Radius des Basiskreises. Die Gerade durch den Mittelpunkt des Grundkreises und die Spitze nennt man die Achse des Kegels. Die Höhe h{displaystyle h} des Kegels ist der Abstand der Spitze von der Basisebene; dieser Abstand muss senkrecht zur Basisebene gemessen werden.


Steht die Achse senkrecht zur Basisebene, so liegt ein gerader Kreiskegel oder Drehkegel vor. Andernfalls spricht man von einem schiefen Kreiskegel oder elliptischen Kegel. Jeder elliptische Kegel hat zwei Richtungen, in denen sein Schnitt mit einer Ebene ein Kreis ist; diese Tatsache macht sich die stereografische Projektion als Kreistreue zunutze.
Die Bezeichnung „Drehkegel“ deutet darauf hin, dass es sich um einen Rotationskörper handelt. Er entsteht durch Rotation eines rechtwinkligen Dreiecks um eine seiner beiden Katheten. In diesem Fall werden die Mantellinien (also die Verbindungsstrecken der (Rand-) Punkte des Basiskreises mit der Spitze) auch Erzeugende genannt (s{displaystyle s}), da sie den Mantel „erzeugen“. Der Öffnungswinkel beträgt das Doppelte des Winkels zwischen den Mantellinien und der Achse eines Drehkegels. Der Winkel φ{displaystyle varphi } zwischen den Mantellinien und der Achse heißt halber Öffnungswinkel.


Ein Drehkegel mit Öffnungswinkel 60° heißt gleichseitiger Kegel. Diese Bezeichnung erklärt sich wie folgt: Schneidet man einen solchen Kegel mit einer Ebene, die die Achse enthält, so erhält man ein gleichseitiges Dreieck.
Vor allem in der Technik wird für den Drehkegel auch das Wort Konus (von lat. conus) verwendet. Das zugehörige Eigenschaftswort konisch bezeichnet Objekte mit der Form eines Drehkegels oder eines (Dreh-) Kegelstumpfs.
Insbesondere im Zusammenhang mit Kegelschnitten wird das Wort „Kegel“ auch im Sinn des unten erwähnten Doppelkegels gebraucht.
Größen und Formeln |

Gerader Kreiskegel
| Größen und Formeln | ||
|---|---|---|
Radius eines geraden Kreiskegels | r=s2−h2{displaystyle r={sqrt {s^{2}-h^{2}}}} | |
Höhe eines geraden Kreiskegels | h=s2−r2{displaystyle h={sqrt {s^{2}-r^{2}}}} | |
Mantellinie eines geraden Kreiskegels | s=h2+r2{displaystyle s={sqrt {h^{2}+r^{2}}}} | |
Winkel φ{displaystyle varphi } eines geraden Kreiskegels | Anwendung der trigonometrischen Funktionen sinφ=Gegenkathete von φHypotenuse=rs{displaystyle sin varphi ={frac {{text{Gegenkathete von }}varphi }{text{Hypotenuse}}}={frac {r}{s}}} | |
Durchmesser der Grundfläche eines geraden Kreiskegels | d=2⋅r=2⋅h⋅tanφ{displaystyle d=2cdot r=2cdot hcdot tan varphi } | |
| Grundfläche eines Kreiskegels | AG=r2⋅π{displaystyle A_{G}=r^{2}cdot pi } | |
Flächeninhalt der Mantelfläche eines geraden Kreiskegels | AM=r⋅s⋅π{displaystyle A_{M}=rcdot scdot pi } | |
| Oberfläche eines geraden Kreiskegels | AO=AG+AM=r⋅π⋅(r+s){displaystyle A_{O}=A_{G}+A_{M}=rcdot pi cdot (r+s)} | |
Volumen eines beliebigen Kreiskegels | V=13⋅π⋅r2⋅h=13⋅AG⋅h{displaystyle V={frac {1}{3}}cdot pi cdot r^{2}cdot h={frac {1}{3}}cdot A_{G}cdot h} | |
Trägheitsmoment Die Drehachse verläuft durch die Spitze | eines rotierenden, massiven und geraden Kreiskegels: J=110⋅ρ⋅r4⋅π⋅h=310⋅m⋅r2{displaystyle J={frac {1}{10}}cdot rho cdot r^{4}cdot pi cdot h={frac {3}{10}}cdot mcdot r^{2}} | |















Beweise |
Volumen |
Bereits im Jahr 1781 beschreibt Johann Friedrich Lorenz in seiner Übersetzung Euklids Elemente Euklids Feststellung: Jeder Kegel ist der dritte Theil eines Cylinders, welcher mit ihm einerley Grundfläche, ABCD, und gleiche Höhe hat.[1] In der Elementargeometrie wird die Volumenformel oft mit dem Prinzip von Cavalieri begründet. Man vergleicht den gegebenen Kreiskegel mit einer Pyramide von gleicher Grundfläche und Höhe. Für Parallelebenen zur Grundfläche in beliebigem Abstand folgt aus den Gesetzen der Ähnlichkeit bzw. der zentrischen Streckung, dass die entsprechenden Schnittflächen gleichen Flächeninhalt besitzen. Daher müssen die beiden Körper im Volumen übereinstimmen. Die für Pyramiden der Grundfläche AG{displaystyle A_{G}} und Höhe h{displaystyle h} gültige Volumenformel

- V=13⋅AG⋅h{displaystyle V={frac {1}{3}}cdot A_{G}cdot h}

kann daher auf den Kegel übertragen werden. Zusammen mit der Formel für die Kreisfläche erhält man
V=13⋅r2⋅π⋅h{displaystyle V={frac {1}{3}}cdot r^{2}cdot pi cdot h}.

Es ist auch möglich, den Kegel durch eine Pyramide mit regelmäßigem n-Eck als Grundfläche (für n→∞{displaystyle nto infty }) anzunähern.

Ein anderer Beweis (hier speziell für den geraden Kreiskegel dargestellt) setzt die Integralrechnung als Hilfsmittel ein. Es wird ein kartesisches Koordinatensystem verwendet, wobei die Kegelspitze im Ursprung (0|0) und der Mittelpunkt des Grundkreises im Punkt (h{displaystyle h}|0) liegen. Man kann sich nun den Kegel zusammengesetzt denken aus unendlich vielen zylindrischen Scheiben infinitesimaler (unendlich kleiner) Höhe (Dicke) dx{displaystyle mathrm {d} x}. Da der Abstand einer solchen Zylinderscheibe von der Kegelspitze durch die Koordinate x{displaystyle x} gegeben ist, gilt nach dem Strahlensatz:


- Radius eines infinitesimalen Zylinders: rZ(x)=rhx{displaystyle r_{Z}(x)={frac {r}{h}}x}

- Volumen eines infinitesimalen Zylinders: (rhx)2πdx=r2h2πx2dx{displaystyle left({frac {r}{h}}xright)^{2}pi mathrm {d} x={frac {r^{2}}{h^{2}}}pi x^{2},mathrm {d} x}

Das gesamte Volumen des Drehkegels entspricht der Gesamtheit all dieser unendlich kleinen Zylinder. Zur Berechnung bildet man das bestimmte Integral mit den Integrationsgrenzen 0 und h{displaystyle h}:
- V=∫0hr2h2πx2dx=r2πh2∫0hx2dx{displaystyle V=int _{0}^{h}{frac {r^{2}}{h^{2}}}pi x^{2},mathrm {d} x={frac {r^{2}pi }{h^{2}}}int _{0}^{h}x^{2},mathrm {d} x}

- V=r2πh2[x33]0h{displaystyle V={frac {r^{2}pi }{h^{2}}}left[{frac {x^{3}}{3}}right]_{0}^{h}}
![{displaystyle V={frac {r^{2}pi }{h^{2}}}left[{frac {x^{3}}{3}}right]_{0}^{h}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2138a85318cfab70e0cc2887ec38da21627a4b73)
- V=r2πh2(h33−033){displaystyle V={frac {r^{2}pi }{h^{2}}}left({frac {h^{3}}{3}}-{frac {0^{3}}{3}}right)}

- V=r2πh2h33{displaystyle V={frac {r^{2}pi }{h^{2}}}{frac {h^{3}}{3}}}

Damit kommt man zur bekannten Formel
V=r2πh3=13r2πh{displaystyle V={frac {r^{2}pi h}{3}}={frac {1}{3}}r^{2}pi h}.

Mantelfläche |

Gerader Kreiskegel mit abgewickelter Mantelfläche
Die Mantelfläche eines geraden Kreiskegels ist gekrümmt, aber zu einem Kreissektor abwickelbar. Der Radius dieses Sektors stimmt mit der Länge einer Mantellinie des Kegels (s{displaystyle s}) überein. Den Mittelpunktswinkel α{displaystyle alpha } des Kreissektors kann man durch eine Verhältnisgleichung ermitteln. Er verhält sich zum 360°-Winkel wie die Kreisbogenlänge 2πr{displaystyle 2pi r} (Umfang des Basiskreises) zum gesamten Umfang eines Kreises mit Radius s{displaystyle s}:


- α360∘=2πr2πs=rs{displaystyle {frac {alpha }{360^{circ }}}={frac {2pi r}{2pi s}}={frac {r}{s}}}

Der gesuchte Flächeninhalt der Mantelfläche ergibt sich nun aus der Formel für den Flächeninhalt eines Kreissektors:
- AM=α360∘s2π=rss2π=rsπ{displaystyle A_{M}={frac {alpha }{360^{circ }}}s^{2}pi ={frac {r}{s}}s^{2}pi =rspi }

Die Abwicklung der Mantelfläche eines geraden Kreiskegels wird in der Darstellenden Geometrie näherungsweise mit Zirkel und Lineal durchgeführt: s. Abwicklung (Darstellende Geometrie).
Mittelpunktswinkel α |
Der Mittelpunktswinkel α{displaystyle alpha } kann ausgehend von der Formel
- α360∘=2πr2πs=rs{displaystyle {frac {alpha }{360^{circ }}}={frac {2pi r}{2pi s}}={frac {r}{s}}}
berechnet werden:
- α=rs⋅360∘,{displaystyle alpha ={frac {r}{s}}cdot {360^{circ }},}

ebenso
- α=ds⋅180∘{displaystyle alpha ={frac {d}{s}}cdot {180^{circ }}}

mit d{displaystyle d} = Grundflächendurchmesser, s{displaystyle s} = Mantellinie = Zeichenradius.

Doppelkegel |

Doppelkegel mit gegeneinander gerichteten Spitzen, einer Sanduhr ähnlich
Ein Doppelkegel entsteht als Rotationsfläche einer Geraden um eine sie nicht rechtwinkelig schneidende Achse. Es entstehen zwei Drehkegel mit dem gleichen Öffnungswinkel und einer gemeinsamen Achse, die sich in der Spitze berühren. Schneidet man einen solchen unendlichen Doppelkegel mit einer Ebene, entstehen die Kegelschnitte: Kreis, Ellipse, Parabel, Hyperbel.
Analytische Beschreibung |
Ein senkrechter Kreiskegel (Doppelkegel) mit der Spitze im Ursprung und der z-Achse als Symmetrieachse lässt sich durch eine Gleichung
- x2+y2=R2z2{displaystyle x^{2}+y^{2}=R^{2}z^{2}}

beschreiben. Die Zahl R{displaystyle R} ist der Radius der Höhenkreise der Höhen z=±1{displaystyle z=pm 1}. Ist R=1{displaystyle R=1}, so vereinfacht sich die Gleichung zu



- x2+y2=z2{displaystyle x^{2}+y^{2}=z^{2}}

und man nennt in diesem Fall den Kegel Einheitskegel (analog zum Einheitskreis).
So, wie eine beliebige Ellipse das affine Bild des Einheitskreises ist, ist ein beliebiger Kegel (als Quadrik) das affine Bild des Einheitskegels. Die einfachsten affinen Abbildungen sind Skalierungen der Koordinaten. Skaliert man die x- und y-Achse, so ergeben sich Kegel mit Gleichungen
- Kab:x2a2+y2b2=z2;a,b>0.{displaystyle K_{ab}colon ,{frac {x^{2}}{a^{2}}}+{frac {y^{2}}{b^{2}}}=z^{2};;;a,b>0.}

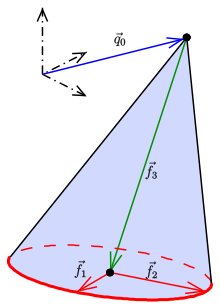
Vektoren für die Parameterdarstellung eines allgemeinen Kegels (Quadrik)
Die Höhenschnitte solcher Kegel sind Ellipsen. Der Schnitt mit der Höhenebene z=1{displaystyle z=1} ist die Ellipse E:x2a2+y2b2=1{displaystyle Ecolon {tfrac {x^{2}}{a^{2}}}+{tfrac {y^{2}}{b^{2}}}=1}. Der Kegel ist gleich der Vereinigung aller Geraden (Erzeugenden) durch die Spitze und die Ellipsenpunkte. Beschreibt man die Ellipse E{displaystyle E} durch die Parameterdarstellung x→(t)=(acost,bsint,1){displaystyle {vec {x}}(t)=(acos t,bsin t,1)} und stellt die Erzeugenden in Parameterform dar, erhält man die folgende Parameterdarstellung des Kegels Kab{displaystyle K_{ab}}:





- Kab:x→(s,t)=s⋅(acost,bsint,1)T;s∈R,0≤t<2π{displaystyle K_{ab}colon ,{vec {x}}(s,t)=scdot (acos t,bsin t,1)^{T};;;sin mathbb {R} ,,0leq t<2pi }

Die Gleichung eines im Raum beliebig gelagerten Kegels ist schwierig anzugeben.
Die Parameterdarstellung eines beliebigen Kegels dagegen relativ einfach:
- x→(s,t)=q→0+sf→1cost+sf→2sint+sf→3; s∈R,0≤ t<2π{displaystyle {vec {x}}(s,t)={vec {q}}_{0}+s{vec {f}}_{1}cos t+s{vec {f}}_{2}sin t+s{vec {f}}_{3};;; sin mathbb {R} ,,0leq t<2pi }

Dabei ist q→0{displaystyle {vec {q}}_{0}} die Spitze des Kegels und f→1,f→2,f→3{displaystyle {vec {f}}_{1},{vec {f}}_{2},{vec {f}}_{3}} sind drei linear unabhängige Vektoren. f→3{displaystyle {vec {f}}_{3}} zeigt in Richtung der Kegelachse (s. Bild).[2] Für jeden konstanten Parameter s{displaystyle s} ergibt sich eine Ellipse, mit der man sich (zusammen mit der Spitze) den Kegel erzeugt denken kann.



Sind die drei Vektoren f→1,f→2,f→3{displaystyle {vec {f}}_{1},{vec {f}}_{2},{vec {f}}_{3}} paarweise orthogonal und ist |f→1|=|f→2|{displaystyle |{vec {f}}_{1}|=|{vec {f}}_{2}|}, so wird durch die Parameterdarstellung ein senkrechter Kreiskegel beschrieben.

Dass ein beliebiger elliptischer Kegel auch immer Kreise enthält, wird in Kreisschnittebene gezeigt.
Kegelkoordinaten (Koordinaten-Transformation) |
Parameterdarstellung |
Die Parameterdarstellung des Kegels kann man wie folgt beschreiben. Mit der Abbildung P→{displaystyle {overrightarrow {P}}} lassen sich die Kegelkoordinaten in kartesische Koordinaten umrechnen. Mit der Abbildung Q→{displaystyle {overrightarrow {Q}}} lassen sich die kartesischen Koordinaten in Kegelkoordinaten umrechnen.


P→(γ,φ,χ)=(xyz)=χ⋅(γcos(φ)γsin(φ)1)Q→(x,y,z)=(γφχ)=(1zx2+y2arctan2(y,x)z){displaystyle {overrightarrow {P}}(gamma ,varphi ,chi )={begin{pmatrix}x\y\zend{pmatrix}}=chi cdot {begin{pmatrix}gamma cos(varphi )\gamma sin(varphi )\1end{pmatrix}}quad quad quad {overrightarrow {Q}}(x,y,z)={begin{pmatrix}gamma \varphi \chi end{pmatrix}}={begin{pmatrix}{frac {1}{z}}{sqrt {x^{2}+y^{2}}}\arctan 2(y,x)\zend{pmatrix}}}

Umrechnung eines gegebenen Kegelsegments in Kegelkoordinaten |

Kegelsegment mit Höhe h und den Radien r1 und r2
Wie folgt seien die Parameter eines Kegelsegments gegeben (siehe nebenstehende Abbildung):
r1≤r≤r20≤φ≤2πh=z2−z1{displaystyle r_{1}leq rleq r_{2}quad quad quad 0leq varphi leq 2pi quad quad quad h=z_{2}-z_{1}}

Dann lassen sich die Grenzen in Kegelparametern wie folgt ausdrücken:
γ1=r2−r1hχ1=r1γ1=h⋅r1r2−r1χ2=r2γ2=h⋅r2r2−r−1{displaystyle gamma _{1}={frac {r_{2}-r_{1}}{h}}quad quad chi _{1}={frac {r_{1}}{gamma _{1}}}=hcdot {frac {r_{1}}{r_{2}-r_{1}}}quad quad chi _{2}={frac {r_{2}}{gamma _{2}}}=hcdot {frac {r_{2}}{r_{2}-r-1}}}

Die Parameter bewegen sich also im Bereich:
0≤γ≤γ10≤φ≤2πχ1≤χ≤χ2{displaystyle 0leq gamma leq gamma _{1}quad quad quad 0leq varphi leq 2pi quad quad quad chi _{1}leq chi leq chi _{2}}

Flächennormalenvektor |
Der Flächennormalenvektor ist orthogonal zur Mantelfläche des Kegels. Er wird benötigt um z. B. Flussberechnungen durch die Mantelfläche durchzuführen. Den Flächeninhalt der Mantelfläche lässt sich als Doppelintegral über die Norm des Flächennormalenvektors berechnen.
n→=∂P→∂φ×∂P→∂χ=χγ⋅(cos(φ)sin(φ)−γ){displaystyle {overrightarrow {n}}={frac {partial {overrightarrow {P}}}{partial varphi }}times {frac {partial {overrightarrow {P}}}{partial chi }}=chi gamma cdot {begin{pmatrix}cos(varphi )\sin(varphi )\-gamma end{pmatrix}}}

Einheitsvektoren der Kegelkoordinaten in kartesischen Komponenten |
Die Einheitsvektoren in kartesischen Komponenten erhält man durch Normierung der Tangentenvektoren der Parametrisierung. Der Tangentenvektor ergibt sich durch die erste partielle Ableitung nach der jeweiligen Variablen. Diese drei Einheitsvektoren bilden eine Normalbasis. Es handelt sich hierbei nicht um eine Orthonormalbasis, da nicht alle Einheitsvektoren orthogonal zueinander sind.
eγ→=∂γP→‖∂γP→‖=(cos(φ)sin(φ)0)eφ→=∂φP→‖∂φP→‖=(−sin(φ)cos(φ)0)eχ→=∂χP→‖∂χP→‖=11+γ2(γcos(φ)γsin(φ)1){displaystyle {overrightarrow {e_{gamma }}}={frac {partial _{gamma }{overrightarrow {P}}}{left|partial _{gamma }{overrightarrow {P}}right|}}={begin{pmatrix}cos(varphi )\sin(varphi )\0end{pmatrix}}quad quad {overrightarrow {e_{varphi }}}={frac {partial _{varphi }{overrightarrow {P}}}{left|partial _{varphi }{overrightarrow {P}}right|}}={begin{pmatrix}-sin(varphi )\cos(varphi )\0end{pmatrix}}quad quad {overrightarrow {e_{chi }}}={frac {partial _{chi }{overrightarrow {P}}}{left|partial _{chi }{overrightarrow {P}}right|}}={frac {1}{sqrt {1+gamma ^{2}}}}{begin{pmatrix}gamma cos(varphi )\gamma sin(varphi )\1end{pmatrix}}}

Transformationsmatrizen |
Jacobi-Matrix (Funktionalmatrix) |
Die Funktionalmatrix und ihre Inverse werden benötigt, um später die partiellen Ableitungen zu transformieren.
Jf=∂(x,y,z)∂(γ,φ,χ)=(∂γx∂φx∂χx∂γy∂φy∂χy∂γz∂φz∂χz)=(χcos(φ)−χγsin(φγcos(φ)χsin(φ)χγcos(φ)γsin(φ)001){displaystyle J_{f}={frac {partial left(x,y,zright)}{partial left(gamma ,varphi ,chi right)}}={begin{pmatrix}partial _{gamma }x&partial _{varphi }x&partial _{chi }x\partial _{gamma }y&partial _{varphi }y&partial _{chi }y\partial _{gamma }z&partial _{varphi }z&partial _{chi }zend{pmatrix}}={begin{pmatrix}chi cos(varphi )&-chi gamma sin(varphi &gamma cos(varphi )\chi sin(varphi )&chi gamma cos(varphi )&gamma sin(varphi )\0&0&1end{pmatrix}}}

Jf−1=∂(γ,φ,χ)∂(x,y,z)=(∂xγ∂yγ∂zγ∂xφ∂yφ∂zφ∂xχ∂yχ∂zχ)=(cos(φ)χsin(φ)χ−γχ−sin(φ)χγcos(φ)χγ0001){displaystyle J_{f}^{-1}={frac {partial left(gamma ,varphi ,chi right)}{partial left(x,y,zright)}}={begin{pmatrix}partial _{x}gamma &partial _{y}gamma &partial _{z}gamma \partial _{x}varphi &partial _{y}varphi &partial _{z}varphi \partial _{x}chi &partial _{y}chi &partial _{z}chi end{pmatrix}}={begin{pmatrix}{frac {cos(varphi )}{chi }}&{frac {sin(varphi )}{chi }}&-{frac {gamma }{chi }}\-{frac {sin(varphi )}{chi gamma }}&{frac {cos(varphi )}{chi gamma }}&0\0&0&1end{pmatrix}}}

Transformationsmatrix S |
Die Transformationsmatrix wird benötigt um die Einheitsvektoren und Vektorfelder zu transformieren. Die Matrix setzt sich aus den Einheitsvektoren der Parametrisierung als Spaltenvektoren zusammen. Genaueres findet man unter dem Artikel Basiswechsel.
S=(eγ→eφ→eχ→)=(cos(φ)−sin(φ)γcos(φ)1+γ2sin(φ)cos(φ)γsin(φ)1+γ20011+γ2)S−1=(cos(φ)sin(φ)−γ−sin(φ)cos(φ)0001+γ2){displaystyle S={begin{pmatrix}{overrightarrow {e_{gamma }}}&{overrightarrow {e_{varphi }}}&{overrightarrow {e_{chi }}}end{pmatrix}}={begin{pmatrix}cos(varphi )&-sin(varphi )&{frac {gamma cos(varphi )}{sqrt {1+gamma ^{2}}}}\sin(varphi )&cos(varphi )&{frac {gamma sin(varphi )}{sqrt {1+gamma ^{2}}}}\0&0&{frac {1}{sqrt {1+gamma ^{2}}}}end{pmatrix}}quad quad quad quad S^{-1}={begin{pmatrix}cos(varphi )&sin(varphi )&-gamma \-sin(varphi )&cos(varphi )&0\0&0&{sqrt {1+gamma ^{2}}}end{pmatrix}}}

Transformation der partiellen Ableitungen |
Die partiellen Ableitungen lassen sich mit der inversen Jacobi-Matrix transformieren.
(∂∂x∂∂y∂∂z)=(∂∂γ∂∂φ∂∂χ)⋅Jf−1{displaystyle {begin{pmatrix}{frac {partial }{partial x}}&{frac {partial }{partial y}}&{frac {partial }{partial z}}end{pmatrix}}={begin{pmatrix}{frac {partial }{partial gamma }}&{frac {partial }{partial varphi }}&{frac {partial }{partial chi }}end{pmatrix}}cdot J_{f}^{-1}}

Als Ergebnis erhält man:
∂∂x=cos(φ)χ∂∂γ−sin(φ)γχ∂∂φ{displaystyle {frac {partial }{partial x}}={frac {cos(varphi )}{chi }}{frac {partial }{partial gamma }}-{frac {sin(varphi )}{gamma chi }}{frac {partial }{partial varphi }}}

∂∂y=sin(φ)χ∂∂γ+cos(φ)γχ∂∂φ{displaystyle {frac {partial }{partial y}}={frac {sin(varphi )}{chi }}{frac {partial }{partial gamma }}+{frac {cos(varphi )}{gamma chi }}{frac {partial }{partial varphi }}}

∂∂z=∂∂χ−γχ∂∂γ{displaystyle {frac {partial }{partial z}}={frac {partial }{partial chi }}-{frac {gamma }{chi }}{frac {partial }{partial gamma }}}

Transformation der Einheitsvektoren |
Die Einheitsvektoren lassen sich mit der inversen Transformationsmatrix transformieren.
(ex→ey→ez→)=(eγ→eφ→eχ→)⋅S−1{displaystyle {begin{pmatrix}{overrightarrow {e_{x}}}&{overrightarrow {e_{y}}}&{overrightarrow {e_{z}}}end{pmatrix}}={begin{pmatrix}{overrightarrow {e_{gamma }}}&{overrightarrow {e_{varphi }}}&{overrightarrow {e_{chi }}}end{pmatrix}}cdot S^{-1}}

Als Ergebnis erhält man:
ex→=cos(φ)⋅eγ→−sin(φ)⋅eφ→{displaystyle {overrightarrow {e_{x}}}=cos(varphi )cdot {overrightarrow {e_{gamma }}}-sin(varphi )cdot {overrightarrow {e_{varphi }}}}

ey→=sin(φ)⋅eγ→+cos(φ)⋅eφ→{displaystyle {overrightarrow {e_{y}}}=sin(varphi )cdot {overrightarrow {e_{gamma }}}+cos(varphi )cdot {overrightarrow {e_{varphi }}}}

ez→=1+γ2⋅eχ→−γ⋅eγ→{displaystyle {overrightarrow {e_{z}}}={sqrt {1+gamma ^{2}}}cdot {overrightarrow {e_{chi }}}-gamma cdot {overrightarrow {e_{gamma }}}}

Transformation von Vektorfeldern |
Vektorfelder lassen sich durch Matrixmultiplikation mit der Transformationsmatrix transformieren.
(FxFyFz)=S⋅(FγFφFχ){displaystyle {begin{pmatrix}F_{x}\F_{y}\F_{z}end{pmatrix}}=Scdot {begin{pmatrix}F_{gamma }\F_{varphi }\F_{chi }end{pmatrix}}}

Als Ergebnis erhält man:
Fx=cos(φ)⋅Fγ−sin(φ)⋅Fφ+γcos(φ)1+γ2⋅Fχ{displaystyle F_{x}=cos(varphi )cdot F_{gamma }-sin(varphi )cdot F_{varphi }+{frac {gamma cos(varphi )}{sqrt {1+gamma ^{2}}}}cdot F_{chi }}

Fy=sin(φ)⋅Fγ+cos(φ)⋅Fφ+γsin(φ)1+γ2⋅Fχ{displaystyle F_{y}=sin(varphi )cdot F_{gamma }+cos(varphi )cdot F_{varphi }+{frac {gamma sin(varphi )}{sqrt {1+gamma ^{2}}}}cdot F_{chi }}

Fz=11+γ2⋅Fχ{displaystyle F_{z}={frac {1}{sqrt {1+gamma ^{2}}}}cdot F_{chi }}

Oberflächen- und Volumendifferential |
Das Volumendifferential lässt sich über die Determinante der Jacobi-Matrix angeben. Dies bietet die Möglichkeit z. B. das Volumen eines Kegels per Dreifachintegral zu berechnen.
dV=detJf⋅dγdχdφ=χ2γ⋅dγdχdφ{displaystyle dV=det J_{f}cdot dgamma dchi dvarphi =chi ^{2}gamma cdot dgamma dchi dvarphi }

Das Oberflächendifferential lässt sich mit der Norm des Flächennormalenvektors angeben. Damit kann man z. B. per Doppelintegral den Flächeninhalt der Mantelfläche bestimmen.
dA=‖n→‖⋅dχdφ=χγ1+γ2⋅dχdφwobeiγ=const.{displaystyle dA=|{overrightarrow {n}}|cdot dchi dvarphi =chi gamma {sqrt {1+gamma ^{2}}}cdot dchi dvarphi quad {text{wobei}}quad gamma ={text{const.}}}

Transformierte Vektor-Differentialoperatoren |
Nabla-Operator |
Eine Darstellung des Nabla-Operators in Kegelkoordinaten erhält man, indem man die transformierten Einheitsvektoren und partielle Ableitungen in den kartesischen Nabla-Operator einsetzt:
- ∇=(1+γ2χ∂∂γ−γ∂∂χ)⋅eγ→+(1γχ∂∂φ)⋅eφ→+1+γ2(∂∂χ−γχ∂∂γ)⋅eχ→{displaystyle nabla =left({frac {1+gamma ^{2}}{chi }}{frac {partial }{partial gamma }}-gamma {frac {partial }{partial chi }}right)cdot {overrightarrow {e_{gamma }}}+left({frac {1}{gamma chi }}{frac {partial }{partial varphi }}right)cdot {overrightarrow {e_{varphi }}}+{sqrt {1+gamma ^{2}}}left({frac {partial }{partial chi }}-{frac {gamma }{chi }}{frac {partial }{partial gamma }}right)cdot {overrightarrow {e_{chi }}}}

Gradient |
Den Gradienten in Kegelkoordinaten erhält man, indem man den transformieren Nabla-Operator auf ein Skalarfeld in Kegelkoordinaten anwendet.
- gradϕ=∇ϕ=(1+γ2χ∂ϕ∂γ−γ∂ϕ∂χ)⋅eγ→+(1γχ∂ϕ∂φ)⋅eφ→+1+γ2(∂ϕ∂χ−γχ∂ϕ∂γ)⋅eχ→{displaystyle operatorname {grad} phi =nabla phi =left({frac {1+gamma ^{2}}{chi }}{frac {partial phi }{partial gamma }}-gamma {frac {partial phi }{partial chi }}right)cdot {overrightarrow {e_{gamma }}}+left({frac {1}{gamma chi }}{frac {partial phi }{partial varphi }}right)cdot {overrightarrow {e_{varphi }}}+{sqrt {1+gamma ^{2}}}left({frac {partial phi }{partial chi }}-{frac {gamma }{chi }}{frac {partial phi }{partial gamma }}right)cdot {overrightarrow {e_{chi }}}}

Divergenz |
Den Operator für die Divergenz eines Vektorfeldes erhält man, indem man den Nabla-Operator auf das Vektorfeld in Kegelkoordinaten anwendet:
- divF→=∇⋅F→=1γχ⋅(∂(Fγ⋅γ)∂γ+∂Fφ∂φ)+1χ21+γ2∂(Fχ⋅χ2)∂χ{displaystyle operatorname {div} {overrightarrow {F}}=nabla cdot {overrightarrow {F}}={frac {1}{gamma chi }}cdot left({frac {partial left(F_{gamma }cdot gamma right)}{partial gamma }}+{frac {partial F_{varphi }}{partial varphi }}right)+{frac {1}{chi ^{2}{sqrt {1+gamma ^{2}}}}}{frac {partial left(F_{chi }cdot chi ^{2}right)}{partial chi }}}

Laplace-Operator |
Der Laplace-Operator Δ{displaystyle Delta } ist die Divergenz eines Gradienten. In Kegelkoordinaten ergibt dies den folgenden Operator:

- Δϕ=div(gradϕ)=(1+γ2χ2)∂2ϕ∂γ2+(1+2γ2γχ2)∂ϕ∂γ+(1γχ)2∂2ϕ∂φ2+∂2ϕ∂χ2−(2γχ)∂2ϕ∂γ∂χ{displaystyle Delta phi =operatorname {div} (operatorname {grad} phi )=left({frac {1+gamma ^{2}}{chi ^{2}}}right){frac {partial ^{2}phi }{partial gamma ^{2}}}+left({frac {1+2gamma ^{2}}{gamma chi ^{2}}}right){frac {partial phi }{partial gamma }}+left({frac {1}{gamma chi }}right)^{2}{frac {partial ^{2}phi }{partial varphi ^{2}}}+{frac {partial ^{2}phi }{partial chi ^{2}}}-left({frac {2gamma }{chi }}right){frac {partial ^{2}phi }{partial gamma partial chi }}}

Rotation |
Die Rotation eines Vektorfeldes lässt sich als Kreuzprodukt des Nabla-Operators mit den Elementen des Vektorfelds auffassen:
- rotF→=∇×F→=(1+γ2γχ∂Fχ∂φ+1χ∂Fγ∂φ−1χ∂(Fφ⋅χ)∂χ)eγ→+(∂Fγ∂χ+γ1+γ2∂Fχ∂χ−γχ∂Fγ∂γ−1+γ2χ∂Fχ∂γ)eφ→+(1+γ2χ(∂Fφ∂γ+1γ∂Fφ∂φ))eχ→{displaystyle operatorname {rot} {overrightarrow {F}}=nabla times {overrightarrow {F}}=left({frac {sqrt {1+gamma ^{2}}}{gamma chi }}{frac {partial F_{chi }}{partial varphi }}+{frac {1}{chi }}{frac {partial F_{gamma }}{partial varphi }}-{frac {1}{chi }}{frac {partial left(F_{varphi }cdot chi right)}{partial chi }}right){overrightarrow {e_{gamma }}}+left({frac {partial F_{gamma }}{partial chi }}+{frac {gamma }{sqrt {1+gamma ^{2}}}}{frac {partial F_{chi }}{partial chi }}-{frac {gamma }{chi }}{frac {partial F_{gamma }}{partial gamma }}-{frac {sqrt {1+gamma ^{2}}}{chi }}{frac {partial F_{chi }}{partial gamma }}right){overrightarrow {e_{varphi }}}+left({frac {sqrt {1+gamma ^{2}}}{chi }}left({frac {partial F_{varphi }}{partial gamma }}+{frac {1}{gamma }}{frac {partial F_{varphi }}{partial varphi }}right)right){overrightarrow {e_{chi }}}}

Verallgemeinerungen |
- Konvexe Mengen
Man verallgemeinert die Eigenschaft des (unendlichen) Kegels, aus Strahlen mit gemeinsamem Anfangspunkt zu bestehen, zu kegelförmigen Mengen, zu denen dann z. B. auch eine unendlich hohe Pyramide gehört. Besonderes Interesse gilt dabei den konvexen Kegeln, die in der linearen Optimierung eine Rolle spielen.
Dabei ist der Begriff des Ordnungskegels wichtig: Definiert man eine Halbordnung mittels x≥y:⇔x−y∈K{displaystyle xgeq y:Leftrightarrow x-yin K}, wobei K{displaystyle K} ein konvexer und abgeschlossener Kegel ist, so ist diese reflexiv, antisymmetrisch, transitiv und multiplikativ sowie additiv verträglich. Damit ist eine solche Halbordnung eine Verallgemeinerung der (komponentenweisen) arithmetischen Halbordnung, der der positive Orthant R+n{displaystyle mathbb {R} _{+}^{n}} zugrunde liegt. Eine mögliche Definition eines solchen Kegels lautet:



Sei (E,‖.‖){displaystyle (E,|.|)} ein reeller Banachraum und K{displaystyle K} eine nichtleere Teilmenge von E{displaystyle E}. K{displaystyle K} heißt Kegel, wenn folgende Bedingungen erfüllt sind:

K{displaystyle K} ist abgeschlossen,
x,y∈K⇒x+y∈K{displaystyle x,yin KRightarrow x+yin K},
x∈K,λ≥0⇒λx∈K{displaystyle xin K,lambda geq 0Rightarrow lambda xin K},
K∩−K={0}{displaystyle Kcap -K={0}}.



Wird die vierte Bedingung weggelassen, so erhält man eine mögliche Definition eines Keils.
Allgemeinere Grundflächen
- Als weitere Verallgemeinerung des Kegels kann man beliebige Grundflächen zulassen. Der Kegel entsteht dann als konvexe Hülle der Grundfläche und eines weiteren Punktes außerhalb der Fläche (der Kegelspitze). In diesem Sinne ist eine Pyramide ein Kegel über einem Vieleck.
- In der synthetischen Geometrie wird der Begriff Kegel für bestimmte quadratische Mengen in projektiven Geometrien beliebiger Dimension definiert. Siehe dazu Quadratische Menge#Kegel.
- Topologie
In der Topologie versteht man unter dem Kegel über einem topologischen Raum X{displaystyle X} den Raum, den man aus dem Produkt X×[0,1]{displaystyle Xtimes [0,1]} durch Identifikation aller Punkte in X×{1}{displaystyle Xtimes {1}} (der „Kegelspitze“) erhält.

![Xtimes [0,1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/cd76f8aa27cdb748a869ec11fc6548bcab6d396b)

Den entsprechenden „Doppelkegel“ (durch zusätzliche Identifikation von X×{0}{displaystyle Xtimes {0}}) bezeichnet man auch als Einhängung oder Suspension.

Siehe auch |
- Kegelstumpf
- schiefer Ellipsenkegel
- Konoid
- Leitkegel
Literatur |
- Rolf Baumann: Geometrie für die 9./10. Klasse. Zentrische Streckung, Satz des Pythagoras, Kreis- und Körperberechnungen. 4. Auflage. Mentor-Verlag, München 2003, ISBN 3-580-63635-9.
Weblinks |
Das Namensgeheimnis der Kegelschnitte. Für Doppelkegel.
Einzelnachweise |
↑ Johann Friedrich Lorenz: Euklids Elemente, fünfzehn Bücher, aus dem Griechischen übersetzt. Hrsg.: Im Verlag der Buchhandlung des Waysenhauses. Zwölftes Buch. Halle 1781, S. 308 ff. (Der 10. Satz. Jeder Kegel ist der dritte Theil eines Cylinders, … [abgerufen am 1. November 2018]).
↑ E. Hartmann: Computerunterstützte Darstellende und konstruktive Geometrie. Uni Darmstadt (PDF; 3,4 MB), S. 105.


